Régulation PID de base
Cet article a pour but d’aider le lecteur à créer une perception physique du fonctionnement d’une régulation PID, sans grande analyse et rigueur mathématique. Il vise à faire découvrir la technique aux débutants et à améliorer les connaissances de ceux déjà initiés, avec une approche la plus pratique et simplifiée possible.
Notions Preliminaires
Quelques définitions des acronymes et termes utilisés dans cet article :
- PV : Process Variable ou variable de processus. Variable contrôlée dans le processus, telle que la température, la pression, l’humidité, etc.
- SV ou SP : Point de consigne. Valeur souhaitée pour la variable de processus.
- MV : Variable manipulée. Variable sur laquelle agit le régulateur pour réguler le processus, comme la position d’une vanne, la tension appliquée à une résistance de chauffage, etc.
- Erreur ou Écart : différence entre SV et PV. SV-PV pour action inverse et PV-SV pour action directe.
- Action de régulation : peut être inverse ou directe. Définit de manière générique l’action appliquée à la VM en cas de variations de la PV.
- Action inverse : si PV augmente, MV diminue. Généralement utilisé dans les commandes de chauffage.
- Action directe : si PV augmente, MV augmente. Généralement utilisé dans les commandes de réfrigération.
La technique de régulation PID consiste à calculer une valeur d’actionnement sur le procédé à partir d’informations sur la valeur souhaitée et la valeur actuelle de la variable de procédé. Cette valeur d’action sur le processus est transformée en un signal adapté à l’actionneur utilisé (vanne, moteur, relais) et doit assurer une régulation stable et précise.
De manière très simple, le PID est composé de 3 actions presque intuitives, résumées dans le tableau suivant :
| P | CORRECTION PROPORTIONNELLE À L’ERREUR | La correction à appliquer au processus doit augmenter proportionnellement à l’augmentation de l’erreur entre la valeur réelle et la valeur souhaitée. |
| I | CORRECTION PROPORTIONNELLE AU PRODUIT ERREUR x TEMPS | Les petites erreurs, mais qui existent depuis longtemps, nécessitent une correction plus intensive. |
| D | CORRECTION PROPORTIONNELLE AU TAUX DE VARIATION DE L’ERREUR | Si l’erreur évolue trop rapidement, ce taux de variation doit être réduit pour éviter les oscillations. |
Tableau – PID
Un peu de mathématiques
L’équation PID la plus courante est présentée ci-dessous :

Où Kp, Ki e Kd sont les gains des portions P, I et D et définissent l’intensité de chaque action.
Les dispositifs PID de différents fabricants mettent en œuvre cette équation de différentes manières. Il est habituel d’adopter le concept de « Bande Proportionnelle » remplaçant Kp, « Temps Dérivé » remplaçant Kd et « Taux Intégral » ou « Reset » remplaçant Ki, laissant l’équation comme suit :

Où Pb, Ir et Dt sont liés à Kp, Ki et Kd et seront traités individuellement tout au long de cet article.
Régulation Proportionnelle
En régulation proportionnelle, la valeur de MV est proportionnelle à la valeur d’écart (SV-PV, pour l’action de régulation inverse), c’est-à-dire, pour un écart nul (SV = PV), MV = 0 ; à mesure que l’écart augmente, MV augmente jusqu’à un maximum de 100 %. La valeur de déviation qui cause MV = 100% définit la Bande Proportionnelle (Pb).
Avec Pb élevée, la sortie MV ne prendra une valeur élevée pour corriger le processus que si l’écart est élevé. Avec une faible Pb, la sortie MV prendra des valeurs élevées pour corriger le processus même en cas de petites déviations. En résumé, plus la valeur de Pb est petite, plus l’action de régulation proportionnelle est forte.
La figure suivante illustre l’effet de la variation de Pb sur la régulation d’un procédé :
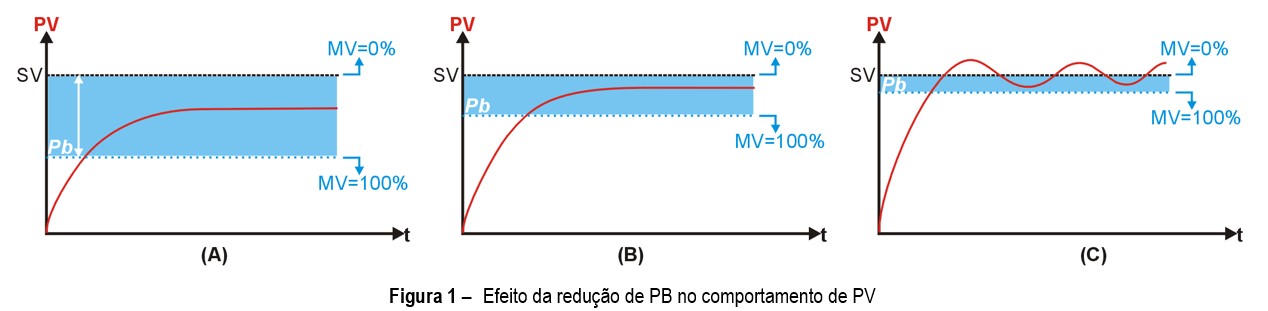
Figure 1 – Effet de la réduction de PB sur le comportement de PV
Dans la Figure 1.A, avec la grande bande proportionnelle, le processus se stabilise, mais bien en dessous du Point de consigne. Avec une diminution de la bande proportionnelle (Figure 1.B), la stabilisation se produit plus près du Point de consigne, mais une réduction excessive de la bande proportionnelle (Figure 1.C) peut entraîner une instabilité du processus (oscillation). Le réglage de la bande proportionnelle fait partie d’un processus appelé Réglage de la régulation.
Lorsque la condition souhaitée (PV = SV) est atteinte, le terme proportionnel donnera MV = 0, c’est-à-dire qu’aucune énergie ne sera délivrée au processus, ce qui fera réapparaître un écart. De ce fait, une régulation proportionnelle pure ne peut jamais se stabiliser avec PV = SV.
De nombreux régulateurs qui fonctionnent uniquement en mode Proportionnel ajoutent une valeur constante à la sortie MV pour garantir que, dans la condition PV = SV, une certaine énergie est fournie au système (généralement 50 %). Cette valeur constante est appelée Bias (polarisation). Lorsqu’il est réglable, il permet d’obtenir une stabilisation PV plus proche de SV.
Incluant la régulation intégrale – PI
L’intégrale n’est pas, isolément, une technique de régulation, car elle ne peut pas être utilisée séparément d’une action proportionnelle. L’action intégrale consiste en une réponse à la sortie du régulateur (MV), qui est proportionnelle à l’amplitude et à la durée de l’écart. L’action intégrale a pour effet d’éliminer l’écart caractéristique d’une régulation purement proportionnelle.
Pour mieux comprendre, imaginons un processus stabilisé avec régulation P, comme le montre la Figure 2.A :
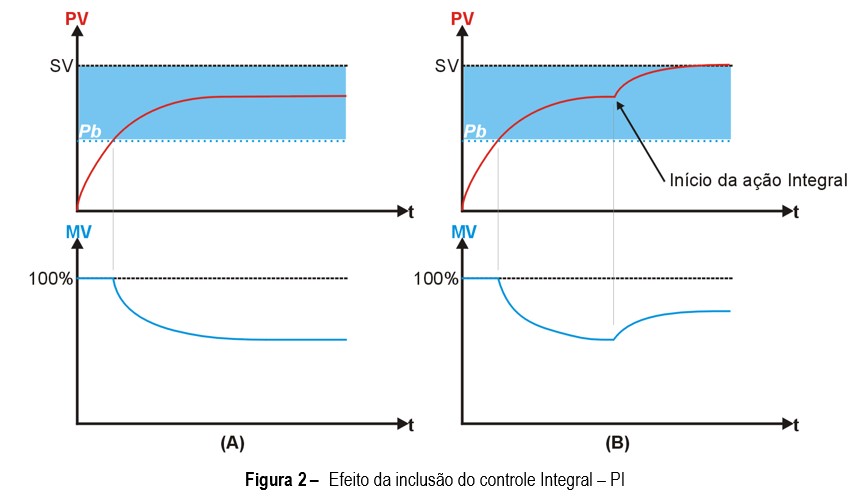
Figure 2 – Effet de l’inclusion de la régulation Intégrale – PI
Dans la Figure 2.A, PV et MV atteignent une condition d’équilibre dans laquelle la quantité d’énergie fournie au système (MV) est nécessaire pour maintenir PV à la valeur à laquelle il se trouve. Dans cette condition, si aucune perturbation ne se produit, le processus restera stable. Malgré sa stabilité, le processus n’a pas atteint le Point de consigne (SV), avec ce que l’on appelle l’Erreur en Régime Permanent.
Regardez maintenant la Figure 2.B, où, au moment indiqué, l’action intégrale a été incluse. Notez l’augmentation progressive de la valeur de MV et l’élimination conséquente de l’erreur en régime permanent. Avec l’inclusion de l’action intégrale, la valeur de MV est progressivement modifiée, dans le sens de l’élimination de l’erreur PV, jusqu’à ce que PV et MV atteignent un nouvel équilibre, mais maintenant avec PV = SV.
L’action intégrale fonctionne comme suit : à intervalles réguliers, l’action intégrale corrige la valeur de MV en y ajoutant la valeur de l’écart SV-PV. Cet intervalle de performance est appelé Temps Intégral, qui peut également être exprimé par son inverse, appelé Taux Intégral (Ir). L’augmentation du Taux Intégral (Ir) augmente les performances d’Intégral dans la régulation du processus.
L’action intégrale a pour seul objectif d’éliminer l’erreur en régime permanent. L’adoption d’un terme intégral trop actif peut conduire à une instabilité du processus. L’adoption d’une intégrale faiblement active retarde trop la stabilisation PV = SV.
Incluant la régulation derivée – PD
La dérivée n’est pas, isolément, une technique de régulation, car elle ne peut pas être utilisée séparément de l’action proportionnelle. L’action dérivée consiste en une réponse à la sortie du régulateur (MV), qui est proportionnelle au taux de variation de l’écart. L’action dérivée a pour effet de ralentir les variations de PV, l’empêchant d’augmenter ou de diminuer trop rapidement.
La dérivée n’agit que lorsqu’il y a variation de l’erreur. Si le processus est stable, son effet est nul. Lors de perturbations ou en début de procédé, lorsque l’erreur est variable, la dérivée agit toujours pour atténuer les variations, et donc sa fonction principale est d’améliorer les performances du procédé lors des transitoires.
La Figure 3 compare les réponses hypothétiques d’un processus avec régulation P (A) et PD (B) :
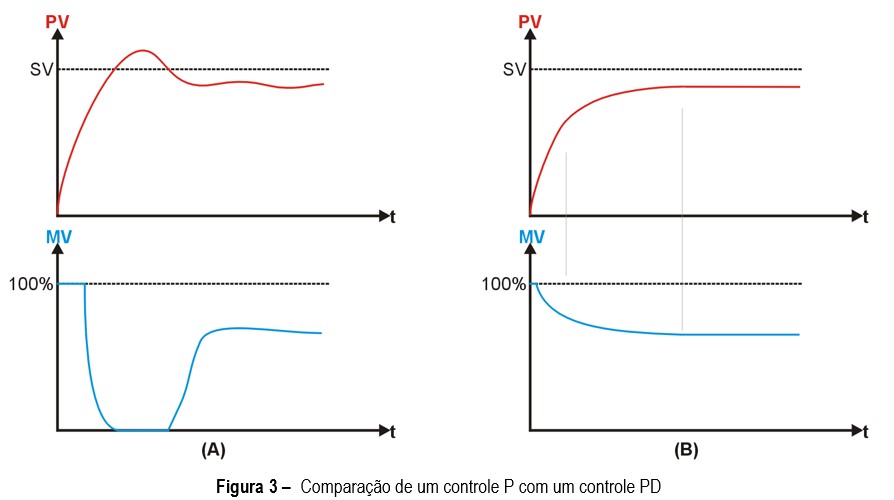
Figure 3 – Comparaison d’une régulation P avec une régulation PD
Dans la régulation P (Figure 3.A), si la bande proportionnelle est petite, il est très probable qu’un « overshoot » se produise, où PV dépasse SV avant de se stabiliser. Cela se produit en raison de la longue durée pendant laquelle MV était à sa valeur maximale et parce que sa réduction a commencé très près de SV, alors qu’il était déjà trop tard pour empêcher l’overshoot.
Une solution serait d’augmenter la bande proportionnelle, mais cela augmenterait l’erreur en régime permanent. Une autre solution consiste à inclure la régulation dérivée (Figure 3.B), qui réduit la valeur de MV si PV croît trop rapidement. En anticipant la variation de PV, l’action dérivée réduit ou élimine l’overshoot et les oscillations dans la période transitoire du procédé.
Mathématiquement, la contribution de la dérivée dans la régulation est calculée comme suit : à intervalles réguliers, le régulateur calcule la variation de l’écart du procédé en ajoutant la valeur de cette variation à la MV. Si PV augmente, l’écart diminue, ce qui se traduit par une variation négative, ce qui réduit la valeur de MV et, par conséquent, retarde l’augmentation de PV. L’intensité de l’action dérivée est ajustée en faisant varier l’intervalle de calcul de la différence. Ce paramètre est appelé Temps Dérivé (Dt). L’augmentation de la valeur de Dt augmente l’action dérivée, réduisant la vitesse de variation de PV.
Régulation PID
En unissant les 3 techniques, on parvient à unir la régulation de base du P avec l’élimination de l’erreur de I et la réduction des oscillations du D, mais cela crée la difficulté d’ajuster l’intensité de chacun des termes, un processus appelé PID réglage.
Apprenez à connaître les régulateurs NOVUS PID : voir ici.
En savoir plus :
7 raisons de choisir un régulateur modulaire
Comment choisir un régulateur de processus pour votre application
Régulateur de processus : N1050 remplit forme et fonction